
Todos os aspiradores nas melhores listas da CNET são testados e avaliados em nossos laboratórios de teste de última geração. Os Laboratórios de Teste da CNET vão além das especificações do produto para testar em condições do mundo real com bagunças da vida real. Nosso laboratório de testes é configurado especificamente para avaliar aspiradores robóticos, que é um ambiente de teste cansativo visto em nenhum outro lugar.
Aqui está um resumo de como medimos o desempenho do vácuo:
Diferenças na pontuação
Na CNET testamos diligentemente o maior número possível de produtos para garantir que possamos lhe dar o melhor conselho. Quando colocamos isso em prática em aspiradores, haverá diferenças inerentes nas metodologias de teste. Para aspiradores sem fio, o manuseio e o conforto são fatores importantes, pois você segura fisicamente o dispositivo na mão para usá-lo. Para aspiradores robóticos, isso não é um fator contribuinte, mas os recursos sim. Então é por isso que você notará uma diferença nos gráficos abaixo.
Metodologia para aspiradores sem fio
| Metodologia de pontuação a vácuo com bastão sem fio | ||
|---|---|---|
| Categoria de subclassificação | Peso | O que procuramos |
| Desempenho | 30% | Pontuação de desempenho extrapolada da pontuação média da areia e da pontuação média do arroz em pisos duros, carpetes de pêlo baixo e carpetes de pêlo médio. |
| Valor/Preço | 25% | Classificação do preço de varejo considerando todos os outros recursos comparados ao valor dos recursos oferecidos. |
| Características | 20% | Utilidade de recursos extras (ou seja, estação de esvaziamento automático, conversão portátil, ferramentas adicionais, várias baterias, tecnologia NAV, esfregão) |
| Manuseio e conforto | 15% | Conforto geral e manuseio do produto. (ou seja, alça pesada versus leve e confortável). |
| Facilidade de uso | 10% | Experiência geral do usuário com configuração, funcionalidade, acessibilidade de aplicativos de smartphone e recursos de casa inteligente. |
Metodologia para aspiradores robóticos
| Categoria de subclassificação | Peso | O que procuramos |
|---|---|---|
| Desempenho | 30% | Pontuação de desempenho extrapolada da pontuação média da areia e da pontuação média do arroz em pisos duros, carpetes de pêlo baixo e carpetes de pêlo médio. |
| Preço | 25% | Classificação do preço de varejo considerando todos os outros recursos comparados ao valor dos recursos oferecidos. |
| Características | 15% | Utilidade de recursos extras (ou seja, estação de esvaziamento automático, conversão portátil, ferramentas adicionais, várias baterias, tecnologia NAV, esfregão) |
| Tempo de execução | 20% | Pontuação de eficiência de navegação (1-10), com base no tempo necessário para concluir um ciclo de limpeza completo dentro da sala de testes NAV de vácuo de robô personalizado da CNET LABS. |
| Facilidade de uso | 10% | Experiência geral do usuário com configuração, funcionalidade, acessibilidade de aplicativos de smartphone e recursos de casa inteligente. |
Teste de vácuo de robô
Teste 1: Capacidade de cobertura do piso
O primeiro teste é descobrir quão bem um robô cobre o chão enquanto está limpando. Construímos uma sala de testes padrão da indústria, conforme especificado pelo Comissão Eletrotécnica Internacional apenas para esse fim. O IEC é um órgão de padronização internacional responsável pelo gerenciamento de procedimentos de teste de vácuo de robôs, entre outras coisas, para fabricantes de vácuo.
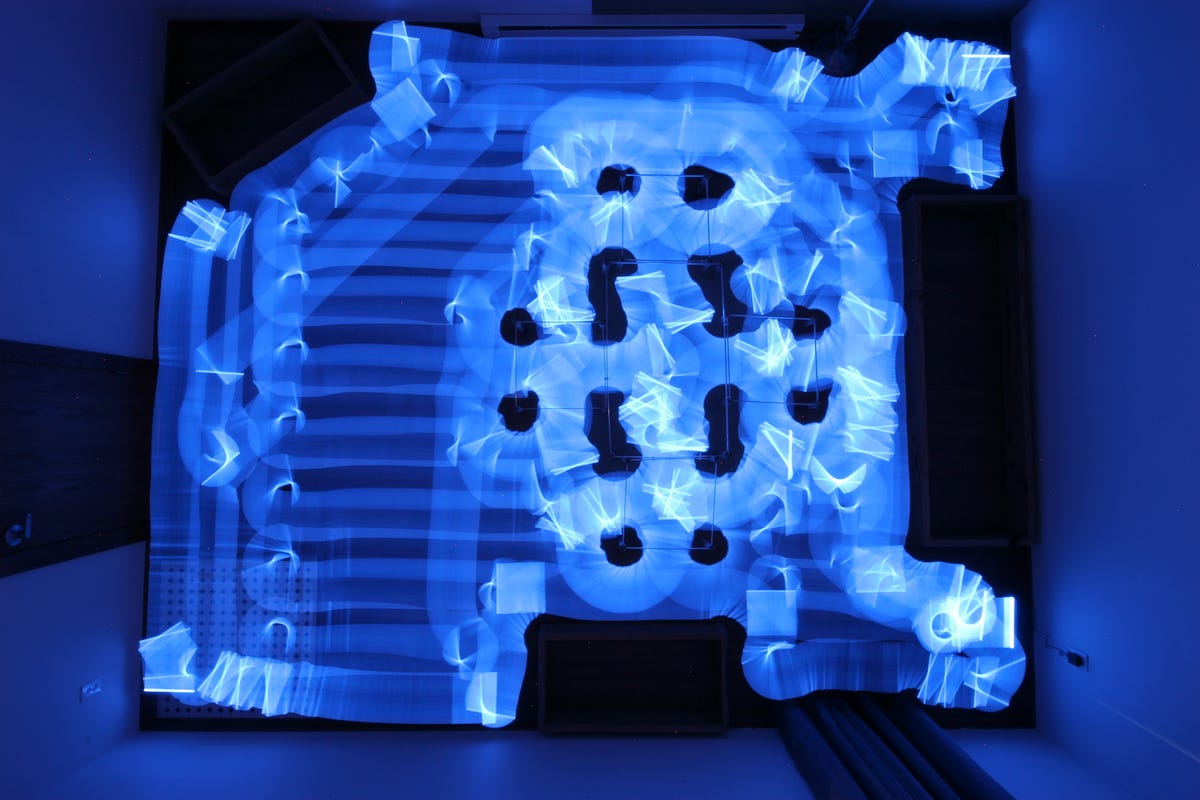
Dentro desta sala estão objetos projetados para simular obstáculos típicos que um robô aspirador encontra para navegação durante a limpeza. Esses obstáculos incluem bordas de paredes, pernas de mesas e cadeiras, sofás, outros móveis e assim por diante, além de pisos de azulejos e madeira, bem como carpetes. Montamos luzes LED na parte superior de cada aspirador. As dimensões das luzes correspondem à largura medida do bico de cada robô aspirador específico que testamos.
À medida que os robôs se movem pela sala durante a limpeza, uma câmera suspensa captura uma imagem de longa exposição de toda a sala com pouca luz. Essa foto terá então um rastro de luz, criado pelos LEDs, que mostra as áreas exatas por onde o robô percorreu (e a posição do bico) durante seu tempo de execução. Também podemos ver áreas do chão onde o aspirador pode ter falhado ou preso. Você pode ver os resultados de navegação de todos os aspiradores robóticos em nosso grupo de teste na galeria abaixo.
Exemplo de navegação guiada a laser
Teste 2: Desempenho de coleta de detritos
O segundo tipo de teste revela exatamente quantos detritos físicos um aspirador é capaz de retirar do chão. Para imitar sujeira com partículas pequenas, usamos uma mistura de areia de brincar e areia de paisagismo. Para solo com partículas maiores, usamos grãos de arroz preto cru. Os robôs então funcionam em linha reta em três tipos de piso (carpete de pêlo baixo, carpete de pêlo médio e pisos de madeira).

Também controlamos a largura específica do bico de cada aspirador. Construímos uma ferramenta ajustável para sujar nossos pisos de teste. Ele nos permite estabelecer uma faixa de uma área precisa de solo para corresponder às dimensões do bocal de cada robô. A massa do solo também não é escolhida ao acaso. Medimos uma quantidade proporcional que está relacionada ao material do piso, tipo de entulho, além da largura do bocal de cada aspirador.
Realizamos três execuções de limpeza (no mínimo) em cada tipo de piso. Também realizamos testes de limpeza com areia e arroz separadamente. Isso equivale a pelo menos 18 testes por aspirador de robô. Pesamos a lata de lixo do robô antes e depois de cada execução. A partir daí podemos calcular a porcentagem de coleta de detritos para cada limpeza e a quantidade média de sujeira que uma máquina consegue remover. Além disso, realizamos testes anedóticos (visuais) de pêlos de animais de estimação para cada robô, em todos os três tipos de piso.

Nosso teste de partículas de tamanho médio à base de arroz não mostrou diferenciação suficiente entre cada limpador, o que indica que todos podem lidar com partículas maiores sem problemas. Para remoção de pelos de donos de animais de estimação, julgamos de forma anedótica.
Teste de aspiradores de pó sem fio

Os aspiradores sem fio melhoraram muito nos últimos anos e agora podem atender à grande maioria das necessidades de limpeza doméstica.
Assim como nos testes de robôs, a largura da bancada de teste é proporcional à largura do bocal do vácuo. Nós mesmos medimos essa largura. Também utilizamos a largura do bocal, além do tipo de piso, para calcular a densidade do solo para cada teste, de acordo com as diretrizes da IEC. Também usamos os mesmos tipos de solo aqui; areia, arroz e pelos de animais de estimação. Realizamos três corridas (no mínimo) em cada tipo de piso. Também testamos o poder de sucção com areia e arroz separadamente. Isso equivale a pelo menos 18 testes por vácuo. Pesamos o coletor de pó do aspirador antes e depois de cada execução.
A partir daí podemos calcular a porcentagem de coleta de sujeira e detritos para cada corrida e a quantidade média de sujeira que um aspirador consegue remover. Além disso, realizamos testes anedóticos (visuais) de pêlos de animais de estimação para cada aspirador, em todos os três tipos de piso, para nos ajudar a selecionar o melhor aspirador sem fio.


